View original at www.therobotreport.com
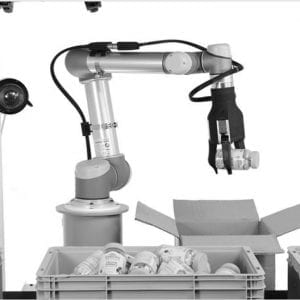
Tactile sensing and force feedback are – and have been – problem areas for robot grasping. Humans could see, select and pick so much faster. Yet to handle the millions of different everyday items in our factories and warehouses, costly positioning and camera systems have been required. These systems made it easy for fast robots with simple grippers to pick items as they came along – but at great cost. Chicago’s huge McCormick Place Conference Center was once again home to the Automate and ProMat trade shows. Automate for robotics; ProMat for material handling solutions. Over 900 exhibitors covered 350,000 sq ft at ProMat while 400+ companies exhibited at the Automate show. Up until recently no vendor has been able to randomly grasp – at speed – all the different products needing to be handled. A major objective of improved grasping – in addition to supplementing or replacing human labor – is to reduce the high cost of fixtures, conveyors, sorting and positioning systems. The challenge to low-cost effective grasping was described in the U.S. Robotics Roadmap : "Challenges include fundamental 1st principles of physics in the development of actuation and sensing. Other challenges include 2 point discrimination, contact localization, extrinsic and intrinsic actuation, back-drivability vs. compliance, speed/strength/power, hand/glove coverings that do not attenuate sensors/motion but are rugged when handling rough and sharp objects." This year a few companies demonstrated smart gripper systems that can piece-pick random goods at speed – far ahead of the research schedule in the Roadmap. Here are two that were at the show: RightHand Robotics was demonstrating their piece-picking solution – a vacuum stick supported by 3-fingers, and 3D vision software that can handle 1000s of SKUs, operate at high speed, has sensor feedback to learn by trial and error and also to ensure […]

Leave a Reply
You must be logged in to post a comment.